电动夹爪
适配型号:myCobot 320、myCobot Pro 600
产品图示

规格说明:
| 名称 | mycobot Pro 电动夹爪 |
|---|---|
| 型号 model | myCobotPro_Gripper_PGE_8 |
| 工艺 | 金属+7500尼龙 |
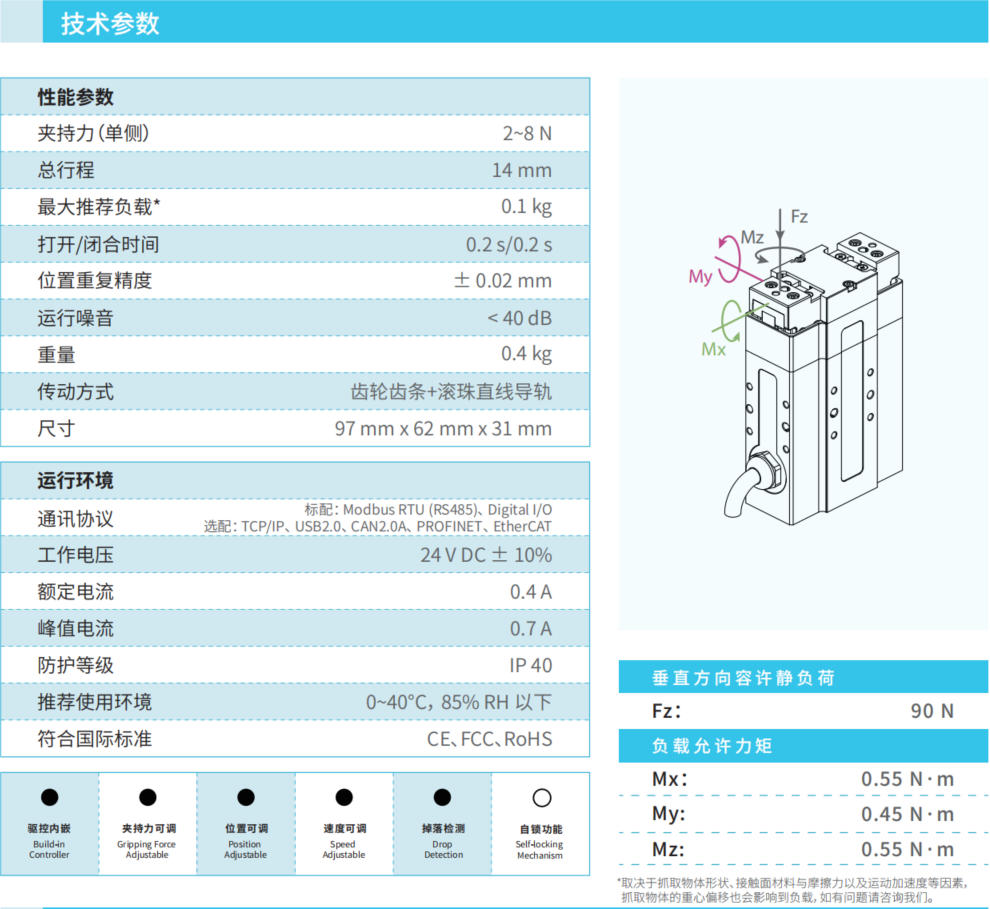
| 夹持范围 Clamp size | 0-14mm |
| 最大夹持力 Clamp force | 2-5N |
| 重复精度 precision | 1mm |
| 使用寿命 Lifetime | 一年 |
| 驱动方式 drive | 电动 |
| 传动方式 | 齿轮齿条+交叉滚子导轨 |
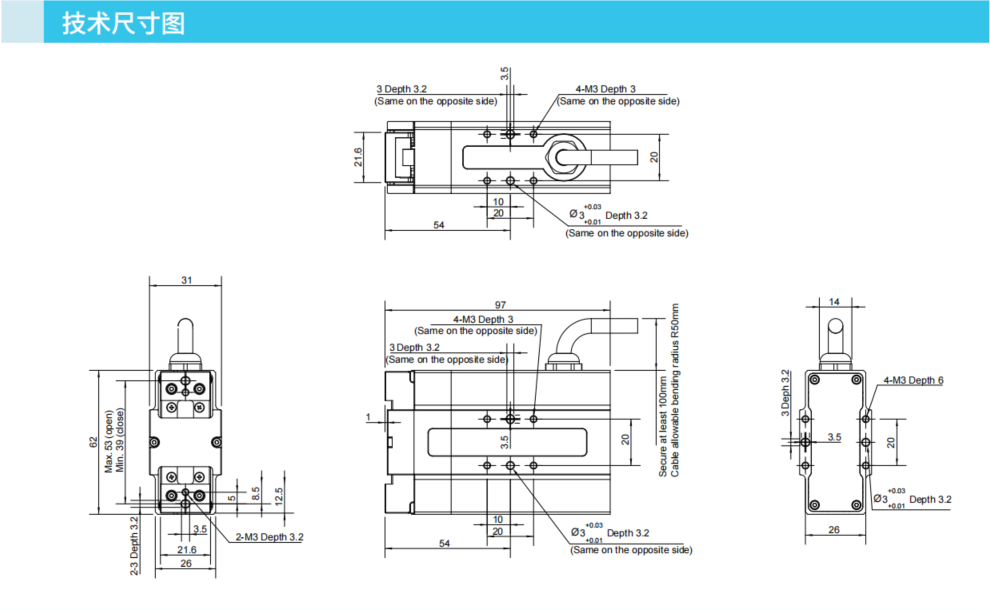
| 尺寸 size | 97×62×31mm |
| 重量 weight | 460g |
| 固定方式 Fixed | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 control | 串口/IO控制 |
| 适用设备 | ER myCobot 320, ER myCobot Pro 600 |
电动夹爪 : 夹取物体使用
简介
PGE系列为工业薄型平行电爪,数字代表夹爪的最大夹持力。夹爪配有一对平行指尖,运动过程中对称运行,夹爪主体结构为平滑的长方形结构,体积小、节约安装空间,拥有 5 面安装孔位,可以满足设备的不同安装条件。
快速响应,抓取频率高,并配有一个 8 芯的通讯接口,主要实现夹住或者卡住物体,适用于相对较轻的物体。
工作原理
- 由电机驱动齿轮齿条和交叉滚子导轨,实现夹爪张开或闭合动作的,电动夹爪的定位点位可控,夹持可控。
适用物体
- 体积小于夹持行程
- 重量小于最大夹持重量
- 自定义的指尖可以扩展更多的物品
产品参数
运行环境
| 环境 | 说明 |
|---|---|
| 通讯协议 | RS - 485 |
| 工作电压 | 24V |
| 额定电流 | 0.25A |
| 峰值电流 | 0.5A |
| 防护等级 | IP40 |
| 推荐使用环境 | 0-40℃ |
淘宝链接:https://item.taobao.com/item.htm?spm=a1z10.5-c-s.0.0.6945364bve0QX4&id=667084571424
使用方法
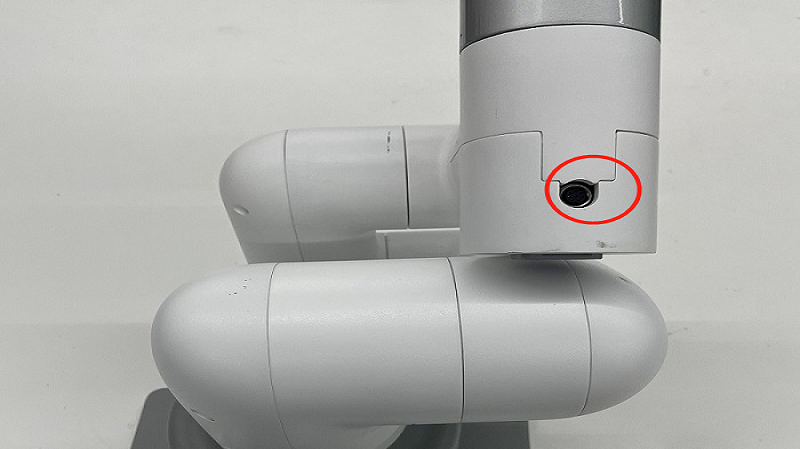
夹爪安装:
- 电动夹爪插在顶端上的485接口处,具体看下图:
myCobot 320使用说明:
- M5版本:
from pymycobot.mycobot import MyCobot
import time
# 初始化一个MyCobot对象
mc = MyCobot("COM3", 115200)
# 可控制夹爪开打-关闭-打开:
mc.set_eletric_gripper(0)
time.sleep(3)
mc.set_eletric_gripper(1)
time.sleep(3)
mc.set_eletric_gripper(0)
time.sleep(3)
- Pi版本:
from pymycobot.mycobot import MyCobot
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
import time
# 初始化一个MyCobot对象
mc = MyCobot(PI_PORT, PI_BAUD)
# 可控制夹爪开打-关闭-打开:
mc.set_eletric_gripper(0)
time.sleep(3)
mc.set_eletric_gripper(1)
time.sleep(3)
mc.set_eletric_gripper(0)
time.sleep(3)
myCobot Pro 600使用说明:
- 运行RoboFlow,选择M5Stack-basic--Gripper;
- 点击Define New Gripper,填写Gripper Name为“DH PGE 8”(必须为此名称),然后点击Save;
- Saved status选择open或者close,整体步骤如下图所示: